"TELÉGRAFO"
 El telégrafo es señales eléctricas para la transmisión de mensajes de texto codificados, como con el código Morse, mediante líneas alámbricas o radiales. El telégrafo eléctrico, o más comúnmente sólo 'telégrafo', reemplazó a los sistemas de transmisión de señales ópticas de semáforos, como los diseñados por Claude Chappe para el ejército francés, y Friedrich Clemens Gerke para el ejército prusiano, convirtiéndose así en la primera forma de comunicación eléctrica.
El telégrafo es señales eléctricas para la transmisión de mensajes de texto codificados, como con el código Morse, mediante líneas alámbricas o radiales. El telégrafo eléctrico, o más comúnmente sólo 'telégrafo', reemplazó a los sistemas de transmisión de señales ópticas de semáforos, como los diseñados por Claude Chappe para el ejército francés, y Friedrich Clemens Gerke para el ejército prusiano, convirtiéndose así en la primera forma de comunicación eléctrica.
HISTORIA:
 |
| Jean Antoine Nollet |
En el año 1746 el científico y religioso francés Jean Antoine Nollet, reunió aproximadamente a doscientos monjes en un círculo de alrededor de una milla (1,6 km) de circunferencia, conectándolos entre sí con trozos de alambre de hierro. Nollet luego descargó una batería de botellas de Leyden a través de la cadena humana y observó que cada uno reaccionaba en forma prácticamente simultánea a la descarga eléctrica, demostrando así que la velocidad de propagación de electricidad era muy alta.
En 1753 un colaborador anónimo de la publicación Scots Magazine sugirió un telégrafo electrostático. Usando un hilo conductor por cada letra del alfabeto, podía ser transmitido un mensaje mediante la conexión de los extremos del conductor a su vez a una máquina electrostática, y observando las desviación de unas bolas de médula en el extremo receptor. Los telégrafos que empleaban la atracción electrostática fueron el fundamento de los primeros experimentos de telegrafía eléctrica en Europa, pero fueron abandonados por ser imprácticos y nunca se convirtieron en un sistema de comunicación muy útil.
En 1800 Alessandro Volta inventó la pila voltaica, lo que permitió el suministro continuo de una corriente eléctrica para la experimentación. Esto se convirtió en una fuente de una corriente de baja tensión mucho menos limitada que la descarga momentánea de una máquina electrostática, con botellas de Leyden que fue el único método conocido anteriormente al surgimiento de fuentes artificiales de electricidad.
Otro experimento inicial en la telegrafía eléctrica fue el telégrafo electroquímico creado por el médico, anatomista e inventor alemán Samuel Thomas von Sömmerring en 1809, basado en un diseño menos robusto de 1804 del erudito y científico español Francisco Salvá Campillo.4 5 Ambos diseños empleaban varios conductores (hasta 35) para representar a casi todas las letras latinas y números. Por lo tanto, los mensajes se podrían transmitir eléctricamente hasta unos cuantos kilómetros (en el diseño de von Sömmering), con cada uno de los cables del receptor sumergido en un tubo individual de vidrio lleno de ácido. Una corriente eléctrica se aplicaba de forma secuencial por el emisor a través de los diferentes conductores que representaban cada carácter de un mensaje; en el extremo receptor las corrientes electrolizaban el ácido en los tubos en secuencia, liberándose corrientes de burbujas de hidrógeno junto a cada carácter recibido. El operador del receptor telégrafo observaba las burbujas y podría entonces registrar el mensaje transmitido, aunque a una velocidad de transmisión muy baja. El principal inconveniente del sistema era su coste prohibitivo, debido a la fabricación de múltiple circuitos de hilo conductor que empleaba, a diferencia del cable con un solo conductor y retorno a tierra, utilizado por los telégrafos posteriores.
En 1816, Francis Ronalds instaló un sistema de telegrafía experimental en los terrenos de su casa en Hammersmith, Londres. Hizo tender 12,9 km de cable de acero cargado con electricidad estática de alta tensión, suspendido por un par de celosías fuertes de madera con 19 barras cada una. En ambos extremos del cable se conectaron indicadores giratorios, operados con motores de relojería, que tenían grabados los números y letras del alfabeto.
El físico Hans Christian Ørsted descubrió en 1820 la desviación de la aguja de una brújula debida a la corriente eléctrica. Ese año, el físico y químico alemán Johann Schweigger basándose en este descubrimiento creó el galvanómetro, arrollando una bobina de conductor alrededor de una brújula, lo que podía usarse como indicador de corriente eléctrica.
En 1821, el matemático y físico francés André-Marie Ampère sugirió un sistema telegráfico a base de un conjunto de galvanómetros, uno por cada carácter transmitido, con el cual afirmó haber experimentado con éxito. Pero en 1824, su colega británico Peter Barlow dijo que tal sistema solo podía trabajar hasta una distancia aproximada de alrededor de 200 pies (61 m) y que, por lo tanto, era impráctico.
En 1825, el físico e inventor británico William Sturgeon inventó el electroimán, arrollando hilo conductor sin aislar alrededor de una herradura de hierro barnizada. El estadounidense Joseph Henry mejoró esta invención en 1828 colocando varios arrollamientos de alambre aislado alrededor de una barra de hierro, creando una electroimán más potente. Tres años después, Henry desarrolló un sistema de telegrafía eléctrica que mejoró en 1835 gracias al relé que inventó, para que fuera usado a través de largos tendidos de cables ya que este dispositivo electromecánico podía reaccionar frente a corrientes eléctricas débiles.
DIFERENTES TIPOS DE TELÉGRAFOS EN EL TIEMPO DE CREACIONES:
Telégrafo de Schilling.

El telégrafo de Gauss-Weber y Carl Steinheil.
Alter y el Telégrafo Elderton
Telégrafo Morse.

Telégrafo de Cooke y Wheatstone.

Telégrafo impresor de Hughes.

Telégrafo de Baudot.

Teletipo.

TELEGRAFÍA Y MÚLTIPLES COMUNICACIONES:

Además de la multiplexión de señales aplicada por Baudot, también se ideó otra forma de enviar varias señales mediante el empleo de la denominada telegrafía armónica, en la cual un circuito telefónico transfiere las señales que modulan diversas señales portadoras de distinta frecuencia en la banda vocal.
LINEAS TELEGRÁFICAS SUBMARINAS:

El cable del Estrecho de Dover no se había protegido suficientemente. Solo los extremos en cada playa se habían acorazado en tubos de plomo. Aunque el cable funcionó hasta cierto grado, las señales procedentes de ambos lados del canal eran confusas. No se reconocía el hecho de que a pesar de estar debidamente aislado, el cable se altera mucho cuando está sumergido. Este problema del retardo de las señales habría de tener perplejos por algún tiempo a muchos ingenieros de cables. Sin embargo, en 1851, se colocó a través del Canal un cable verdaderamente acorazado que tuvo mucho más éxito que su predecesor. En un breve espacio de tiempo, se extendió por el lecho del mar Mediterráneo una red de cables submarinos que unía a Europa con África y las islas intermedias. Ya que se lograron éxitos como éstos, los hombres comenzaron a pensar en cruzar el lecho del océano Atlántico.
EL PRIMER CABLE TELEGRÁFICO TRANSATLÁNTICO:
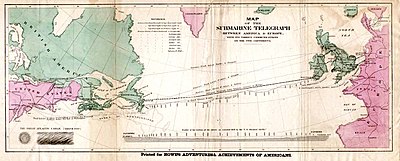 Aunque Inglaterra inició la ingeniería con cables submarinos, el empresario estadounidense Cyrus West Field persistió haciendo esfuerzos que por fin resultaron en el tendido del primer cable a través del Océano Atlántico que dio buenos resultados y que fue el resultado de un esfuerzo conjunto de los gobiernos de Inglaterra y los Estados Unidos. De ambos lados, algunos de los financieros, oceanógrafos, telégrafos y científicos más célebres del mundo colaboraron en esta empresa. Los talentos de estos hombres resultarían indispensables debido a las profundas fosas submarinas que se encontrarían en medio del Atlántico. Aquí la cordillera más grande de la Tierra se extiende por 1.600 kilómetros de longitud y 800 kilómetros de ancho, completamente sumergida.
Aunque Inglaterra inició la ingeniería con cables submarinos, el empresario estadounidense Cyrus West Field persistió haciendo esfuerzos que por fin resultaron en el tendido del primer cable a través del Océano Atlántico que dio buenos resultados y que fue el resultado de un esfuerzo conjunto de los gobiernos de Inglaterra y los Estados Unidos. De ambos lados, algunos de los financieros, oceanógrafos, telégrafos y científicos más célebres del mundo colaboraron en esta empresa. Los talentos de estos hombres resultarían indispensables debido a las profundas fosas submarinas que se encontrarían en medio del Atlántico. Aquí la cordillera más grande de la Tierra se extiende por 1.600 kilómetros de longitud y 800 kilómetros de ancho, completamente sumergida.
Si Field y sus asociados hubiesen sabido de antemano de los muchos años de problemas financieros y desastres que les esperaban al colocar el cable, es muy posible que se hubieran retirado durante sus primeros esfuerzos. Los destrozos de cable, el tiempo adverso y los enredos del cable en el aparato de arriado de los barcos constantemente impedían el proyecto. A veces, cientos de kilómetros de cable roto, cuyo costo ascendía a una fortuna, fueron abandonados en el fondo del mar.
Era preciso resolver el antiguo problema del retardo de las señales. Alguien tenía que descubrir cuánto tardaría una señal en llegar a los extremos lejanos del cable y cuánta electricidad se necesitaría para llenar el cable antes que la señal pudiera pasar. Se puede requerir hasta 20 veces más electricidad para cargar un cable submarino que uno aéreo.
Sir William Thomson, más conocido como Lord Kelvin dedujo la Ley de los Cuadrados como resultado de su investigación de este asunto. Simplificada, esta ley expresa que si se multiplica 10 veces la longitud de un cable sumergido, la velocidad de la señal será reducida 100 veces. La solución que él presentó fue aumentar el tamaño del centro conductor. No obstante, debido a que se pasó por alto este nuevo descubrimiento, el diseño defectuoso del primer cable atlántico contribuyó a su subsiguiente fracaso.
Pero, por fin, el 5 de agosto de 1858 el primer cable submarino trasatlántico unió los continentes entre Irlanda y Terranova. Once días más tarde, un mensaje de saludos de 99 palabras de la reina Victoria de Inglaterra al presidente James Buchanan de los Estados Unidos empezó a pasar por las líneas. Fue completado 16 1⁄2 horas más tarde. Lamentablemente, el cable falló menos de un mes después, lo que representó, al costo actual, cerca de dos millones de dólares de capital privado en pérdidas. Ocho años pasarían antes de que pudiera haber conexiones telegráficas entre Europa y América.
Durante el ínterin, los dos fabricantes de cables de Inglaterra se unieron, resolviendo así muchos de los problemas iniciales de la construcción de cables. Se diseñó un cable nuevo y mejor protegido. Era dos veces más pesado (6.350 toneladas) y tenía un centro conductor tres veces más grande que el cable anterior. Podía colgar verticalmente en el agua por 16 kilómetros antes de quebrarse. Y para el siguiente esfuerzo, solo tuvo que usarse un barco (en vez de los dos que se requerían antes) porque éste era capaz de llevar la gran carga. Esta embarcación, el Great Eastern, tenía un sistema de propulsión doble de dos ruedas de paletas de 18 metros, seis mástiles, y una hélice de siete metros. Esto hizo de ella la nave de mayor maniobrabilidad construida hasta la fecha. Después de otros dos esfuerzos infructuosos, el 27 de julio de 1866 se completó un cable que verdaderamente tuvo éxito. Este unió a Irlanda con Terranova. Pero a una distancia de 1.100 kilómetros del cable nuevo yacía otro enredado con los arreos que se habían perdido. Después de intentos, lograron halarlo a la superficie, someterlo a pruebas y empalmarlo con cable nuevo. Esto completó la porción de occidente a oriente. Con la unión de los extremos de los dos cables en Terranova, llegó a existir un circuito submarino de más de 6.400 kilómetros. Se enviaron señales claras a través de esta distancia. Lo único que se necesitaba para cargar este cable era una batería simple hecha de un dedal de plata que contenía unas cuantas gotas de ácido. Desde ese tiempo, la comunicación de dos direcciones entre los dos continentes nunca ha cesado por más de unas cuantas horas a la vez.
DOMINIO DEL REINO UNIDO EN LA RED TELEGRÁFICA MUNDIAL:
En 1870 se terminó el tendido de una línea que unía India con la Gran Bretaña. Y en 1874 se realiza la conexión con Brasil a través de Lisboa y Madeira.

Otros países también comenzaron a interesarse en un cable telegráfico transatlántico. En 1869 Francia tendió la línea desde Minou, cerca de Brest, hasta Cabo Cod en Estados Unidos. Fue el primer cable colocado por un país distinto al Reino Unido, aunque la empresa que había llevado a cabo el tendido fuera adquirida por empresas del Reino Unido en 1873. En 1879, Francia tendió un segundo cable desde Deolen, 17 km al oeste de Brest, a San Pedro y Miquelón, y el 17 de noviembre de 1879, llegó a Cape Cod.
En 1882, Alemania conectó Emden, mediante un cable submarino, con la estación Británica de Isla Valentia y desde allí, utilizaba el servicio de Anglo American Telegraph. Sin embargo, en 1900, realizó una conexión propia desde Borkum hasta Horta en las islas Azores. Y desde allí a Nueva York. En 1904, tendió otro cable por el mismo trayecto.
De esta manera continuó la expansión de cable. Se habían colocado 15 cables en el Atlántico Norte en 1901. Sin embargo la mayoría de estos cables tenían que pasar por Reino Unido, lo que reforzó su dominio.
En 1902 concluyó el tendido del cable telegráfico a través del Océano Pacífico. Así a principios del siglo XX Gran Bretaña ya disponía de un sistema telegráfico de ámbito mundial que conectaba los principales territorios de su imperio (todas las líneas rojas de la figura anexa).
Las potencias rivales como Francia y Alemania tenían que usar los cables de propiedad británica para retransmitir sus mensajes y, al estallar la guerra en 1914, los alemanes tuvieron que desarrollar sistemas de cifrado para evitar ser escuchados por las potencias aliadas.
IMPORTANCIA SOCIAL DE LA TELEGRAFÍA:
 Algunos contemporáneos a su invención vieron en el telégrafo un potencial democratizador. Comunicando personas a grandes distancias, parecía que esta tecnología podía extender la democracia a gran escala. Un año después de la inauguración en 1794 de la primera línea de telegrafía óptica París-Lille Alexandre Vandermonde (1735-1796) escribía:
Algunos contemporáneos a su invención vieron en el telégrafo un potencial democratizador. Comunicando personas a grandes distancias, parecía que esta tecnología podía extender la democracia a gran escala. Un año después de la inauguración en 1794 de la primera línea de telegrafía óptica París-Lille Alexandre Vandermonde (1735-1796) escribía:
Se ha dicho algo en relación con el telégrafo que me parece infinitamente justo y que pone de manifiesto toda su importancia; es que el fondo de este invento puede bastar para hacer posible el establecimiento de la democracia en un gran pueblo. Muchos hombres respetables, entre los cuales hay que mencionar a Jean-Jacques Rousseau, han pensado que el establecimiento de la democracia era imposible en los grandes pueblos. ¿Cómo puede deliberar un pueblo así? Entre los antiguos, todos los ciudadanos se reunían en una plaza; se comunicaban su voluntad [···] La invención del telégrafo es un nuevo dato que Rousseau no pudo incluir en sus cálculos. Puede servir para hablar a grandes distancias tan sencillamente y tan claramente como en una sala [···] No hay imposibilidad alguna de que todos los ciudadanos de Francia se comuniquen sus informaciones y sus voluntades, en un tiempo bastante corto, para que esta comunicación pueda ser considerada como instantánea. Alexandre Vandermonde (1795)
El sociólogo Armand Mattelart ha señalado como este supuesto potencial democratizador fue desmentido por el embargo sobre el código encriptado y por la negativa del Estado, en nombre de la seguridad interna y la defensa nacional, a que el telégrafo fuera usado libre y abiertamente por los ciudadanos.
FINAL DE LA ERA DE LA TELEGRAFÍA:
Después de la invención en 1985 del servicio de mensajes cortos por parte del ingeniero finlandés Matti Makkonen (1952–2015) que fue implantado en las redes de telefonía celular y de la creación del servicio de correo electrónico mediante la red Internet, perdió importancia la transmisión de mensajes telegráficos ya que los usuarios de las redes de telecomunicaciones comenzaron a transmitir sus propios mensajes sin intermediarios. En Estados Unidos, la compañía Western Union clausuró sus servicios telegráficos el día 27 de enero de 2006. Por su parte, la empresa estatal de India, Bharat Sanchar Nigam Limited cerró sus servicios de telegrafía el 14 de julio de 2013. Según se informó entonces, era la última red de telegrafía activa del mundo.


























